03.06.2011, Алгоритм оценки задержки аналоговых частей в случае трех антенн
Необходимо обобщить результаты, полученные для коммутации двух антенн на случай коммутации трех антенн. Учесть неоднородность задержек в коммутаторе.


Содержание |
Попытка 1
Модель измерений разности фаз
Для измерений разности фаз можно записать следующую модель:
- в фазе 1 циклограммы:


- в фазе 2 циклограммы:


- в фазе 3 циклограммы:


- где
 - задержка с i-го на j-й порт коммутатора,
- задержка с i-го на j-й порт коммутатора,
 - разность задержек i-ой и j-ой аналоговых частей,
- разность задержек i-ой и j-ой аналоговых частей,
 - измеренная первая разность фаз i-ой и j-ой приемной точки,
- измеренная первая разность фаз i-ой и j-ой приемной точки,
 - истинная первая разность фаз i-ой и j-ой приемной точки.
- истинная первая разность фаз i-ой и j-ой приемной точки.
Дополнительный вектор состояния
Как видно из модели измерений разности фаз, для получения истинных первых разностей из измеренных достаточно оценить шесть параметров:
- в фазе 1 циклограммы:


- в фазе 2 циклограммы:


- в фазе 3 циклограммы:


Соберем из них вектор состояния для будущего фильтра:

В качестве модели динамики можно взять:

- где
 - вектор-столбец нормального независимого случайного процесса.
- вектор-столбец нормального независимого случайного процесса.
Модель наблюдений
В качестве измерений можно использовать отфильтрованные величины скачков, которые формировать по аналогии с тем, как это делалось ранее.
Итак, модель наблюдений:
- Скачки из фазы циклограммы 1 в фазу циклограммы 2


- Скачки из фазы циклограммы 2 в фазу циклограммы 3


- Скачки из фазы циклограммы 3 в фазу циклограммы 1


- где
 - измеренный скачок при переключении из фазы циклограммы m в фазу циклограммы n для наблюдений первой разности фаз i-ой и j-ой приемной точки.
- измеренный скачок при переключении из фазы циклограммы m в фазу циклограммы n для наблюдений первой разности фаз i-ой и j-ой приемной точки.
Тогда вектор наблюдений:

Матрица измерений:
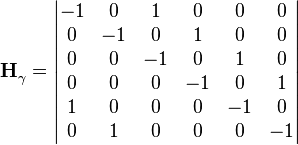
Определитель этой матрицы равен нулю, фильтр неработоспособен.
Рекурсивные уравнения фильтрации
В качестве фильтра берем Калмана с коэффициентами установившегося режима

- где
 .
.
Попытка 2
Параметры <\chi_{ij}> не зависят от спутника. По хорошему, для них нужен общий фильтр.
Рассмотрим случай двух спутников. Введем параметры:






Вектор состояния
Тогда вектор состояния превращается в:

- где
 - разность задержек i-ой и j-ой аналоговых частей для n-го спутника.
- разность задержек i-ой и j-ой аналоговых частей для n-го спутника.
В качестве модели динамики можно опять взять:

- где
 - вектор-столбец нормального независимого случайного процесса.
- вектор-столбец нормального независимого случайного процесса.
Модель наблюдений
- Для первого спутника






- Для второго спутника






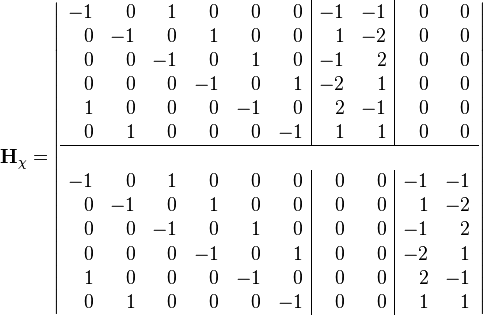
Тогда вектор наблюдений:

Матрица измерений:
[ Хронологический вид ]Комментарии
Войдите, чтобы комментировать.