Дискриминатор частоты с временным сдвигом квадратурных компонент — различия между версиями
Материал из SRNS
Dneprov (обсуждение | вклад) |
Dneprov (обсуждение | вклад) |
||
| Строка 7: | Строка 7: | ||
<math>I_k(\widetilde{\tau}_k,\widetilde{\omega}_{d\,k}) = \sum_{l=1}^{L}y(t_{k,l})h_{c}(t_{k,l}-\widetilde{\tau}_k)\mbox{cos}(\omega_0t_{k,l}+\widetilde{\omega}_{d\,k}(l-1)T_d))</math>,<br /> | <math>I_k(\widetilde{\tau}_k,\widetilde{\omega}_{d\,k}) = \sum_{l=1}^{L}y(t_{k,l})h_{c}(t_{k,l}-\widetilde{\tau}_k)\mbox{cos}(\omega_0t_{k,l}+\widetilde{\omega}_{d\,k}(l-1)T_d))</math>,<br /> | ||
<math>Q_k(\widetilde{\tau}_k,\widetilde{\omega}_{d\,k}) = \sum_{l=1}^{L}y(t_{k,l})h_{c}(t_{k,l}-\widetilde{\tau}_k)\mbox{sin}(\omega_0t_{k,l}+\widetilde{\omega}_{d\,k}(l-1)T_d))</math>.<br /> | <math>Q_k(\widetilde{\tau}_k,\widetilde{\omega}_{d\,k}) = \sum_{l=1}^{L}y(t_{k,l})h_{c}(t_{k,l}-\widetilde{\tau}_k)\mbox{sin}(\omega_0t_{k,l}+\widetilde{\omega}_{d\,k}(l-1)T_d))</math>.<br /> | ||
| − | |||
| − | |||
== Дискриминационная характеристика == | == Дискриминационная характеристика == | ||
Версия 09:01, 25 апреля 2013
Описание дискриминатора
Дискриминатор использует отсчеты коррелятора с текущего и предыдущего такта работы.
 ,
,
где
 ,
,
 .
.
Дискриминационная характеристика
Сделано допущение, что  .
.

В модели задержка сигнала полагалась известной:  .
.
Крутизна дискриминационной характеристики  .
.
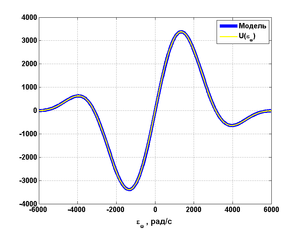
Дискриминационная характеристика
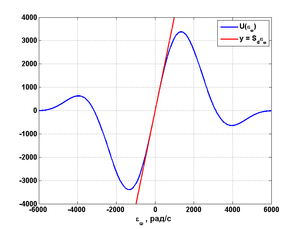
Крутизна дискриминационной характеристики

