Дискриминатор частоты с временным сдвигом квадратурных компонент — различия между версиями
Dneprov (обсуждение | вклад) (→Особенности работы) |
Dneprov (обсуждение | вклад) (→Особенности работы) |
||
| Строка 13: | Строка 13: | ||
== Особенности работы == | == Особенности работы == | ||
[[Файл:20151028_Про перекрытие.png|мини|справа|600пкс|Варианты работы дискриминатора]] | [[Файл:20151028_Про перекрытие.png|мини|справа|600пкс|Варианты работы дискриминатора]] | ||
| − | Отметим, что возможна различная интерпретация работы дискриминатора. На рисунке представлено два возможных варианта, условно названных "с перекрытием" и "без перекрытия". Поясним рисунок. Пусть в некоторые моменты времени <math>t_{k}</math> доступны отсчеты с выхода коррелятора <math>I_k, Q_k</math> и отсчеты из предыдущей эпохи <math>I_{k-1}, Q_{k-1}</math>. На их основе можно сформировать отсчет дискриминатора <math>u_{d\omega,k}</math>. Далее возможны варианты. В случае, если работа идет с "перекрытием", следующий отсчет дискриминатора <math>u_{d\omega,k+1}</math> будет сформирован из новых отсчетов коррелятора <math>I_{k+1}, Q_{k+1}</math> и уже использованных в предыдущем шаге <math>I_k, Q_k</math>. Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Таким образом, шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума. В случае работы без "перекрытия" для расчета соседних значений выхода дискриминатора каждый раз используются разные корреляционные суммы. В этом случае, шум дискриминатора будет некорреллированным с равномерной СПМ. Однако, темп работы такого дискриминатора ниже в 2 раза: ему нужно "дождаться" следующей пары отсчетов. | + | Отметим, что возможна различная интерпретация работы дискриминатора. На рисунке представлено два возможных варианта, условно названных "с перекрытием" и "без перекрытия". Поясним рисунок. Пусть в некоторые моменты времени <math>t_{k}</math> доступны отсчеты с выхода коррелятора <math>I_k, Q_k</math> и отсчеты из предыдущей эпохи <math>I_{k-1}, Q_{k-1}</math>. На их основе можно сформировать отсчет дискриминатора <math>u_{d\omega,k}</math>. Далее возможны варианты. В случае, если работа идет с "перекрытием", следующий отсчет дискриминатора <math>u_{d\omega,k+1}</math> будет сформирован из новых отсчетов коррелятора <math>I_{k+1}, Q_{k+1}</math> и уже использованных в предыдущем шаге <math>I_k, Q_k</math>. Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Таким образом, шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума. В случае работы без "перекрытия" для расчета соседних значений выхода дискриминатора каждый раз используются разные корреляционные суммы. В этом случае, шум дискриминатора будет некорреллированным с равномерной СПМ. Однако, темп работы такого дискриминатора ниже в 2 раза: ему нужно "дождаться" следующей пары отсчетов.<br clear="all" /> |
== Дискриминационная характеристика == | == Дискриминационная характеристика == | ||
Версия 17:24, 28 октября 2015
Содержание |
Описание дискриминатора
Дискриминатор использует отсчеты коррелятора с текущего и предыдущего такта работы.
 ,
,
где
 ,
,
 ,
,
 ,
,
 .
.
Особенности работы

Отметим, что возможна различная интерпретация работы дискриминатора. На рисунке представлено два возможных варианта, условно названных "с перекрытием" и "без перекрытия". Поясним рисунок. Пусть в некоторые моменты времени  доступны отсчеты с выхода коррелятора
доступны отсчеты с выхода коррелятора  и отсчеты из предыдущей эпохи
и отсчеты из предыдущей эпохи  . На их основе можно сформировать отсчет дискриминатора
. На их основе можно сформировать отсчет дискриминатора  . Далее возможны варианты. В случае, если работа идет с "перекрытием", следующий отсчет дискриминатора
. Далее возможны варианты. В случае, если работа идет с "перекрытием", следующий отсчет дискриминатора  будет сформирован из новых отсчетов коррелятора
будет сформирован из новых отсчетов коррелятора  и уже использованных в предыдущем шаге . Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Таким образом, шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума. В случае работы без "перекрытия" для расчета соседних значений выхода дискриминатора каждый раз используются разные корреляционные суммы. В этом случае, шум дискриминатора будет некорреллированным с равномерной СПМ. Однако, темп работы такого дискриминатора ниже в 2 раза: ему нужно "дождаться" следующей пары отсчетов.
и уже использованных в предыдущем шаге . Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Таким образом, шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума. В случае работы без "перекрытия" для расчета соседних значений выхода дискриминатора каждый раз используются разные корреляционные суммы. В этом случае, шум дискриминатора будет некорреллированным с равномерной СПМ. Однако, темп работы такого дискриминатора ниже в 2 раза: ему нужно "дождаться" следующей пары отсчетов.
Дискриминационная характеристика
Сделано допущение, что  .
.

где  ,
,  - амплитуда сигнала
- амплитуда сигнала  ,
,  - количество отчетов, накапливаемых в корреляторе,
- количество отчетов, накапливаемых в корреляторе,  - разность истинного и опорного параметров.
- разность истинного и опорного параметров.
Крутизна дискриминационной характеристики  .
.
В модели задержка сигнала полагалась известной:  .
.
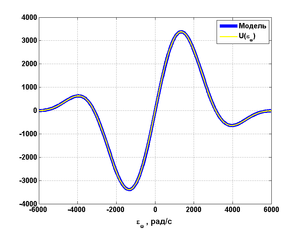
Дискриминационная характеристика
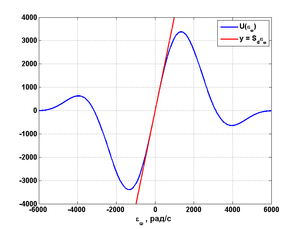
Крутизна дискриминационной характеристики


Флуктуационная характеристика
Получены зависимости СКО шума на выходе дискриминатора от  для различных времен накопления. Теоретические кривые пунктирной линией.
для различных времен накопления. Теоретические кривые пунктирной линией.
_ChD.png)
Дисперсия эквивалентных шумов на входе дискриминатора
