21.03.2014 Полосы следящих систем в Импале
Материал из SRNS
Dneprov (обсуждение | вклад) (Новая страница: «Данная страница являет собой заметку "чтобы не забыть". Необходимо выбрать полосы систе…») |
Dneprov (обсуждение | вклад) |
||
| Строка 5: | Строка 5: | ||
== Система слежения за частотой == | == Система слежения за частотой == | ||
| − | На момент написания этой заметки, в Импале реализована | + | На момент написания этой заметки, в Импале реализована ССЧ второго порядка с [[Дискриминатор частоты с временным сдвигом квадратурных компонент|дискриминатором]] типа <br /> |
| − | + | ||
<math>u_{d \omega } = I_kQ_{k-1} - Q_kI_{k-1}</math>. | <math>u_{d \omega } = I_kQ_{k-1} - Q_kI_{k-1}</math>. | ||
| − | При помощи [[Модель фильтра Калмана 2 порядка|модели]] системы в Matlab получены зависимости СКОш оценивания частоты от полосы системы для различных значений отношения сигнал/шум. В качестве входного воздействия подавался процесс ухода частоты опорного генератора, отвечающий модели вида | + | При помощи [[Модель фильтра Калмана 2 порядка|модели]] системы в Matlab получены зависимости СКОш оценивания частоты от полосы системы для различных значений отношения сигнал/шум. В качестве входного воздействия подавался процесс ухода частоты опорного генератора, отвечающий модели вида: <br /> |
| + | |||
| + | <math>{\omega }_{k} = {\omega _{k - 1}} + \sqrt{\frac{{{S_{og}}T}}{2}}{\xi _{k - 1}}, \xi \sim N(0,\frac{{{S_{og}}T}}{2})</math>. | ||
| + | |||
| + | Результаты моделирования, полученные при параметрах <math>S_{og} = 10 rad^3/s^2, T = 1 ms </math>. | ||
| + | |||
| + | <center><gallery perrow=2 widths="300px" heights="300px"> | ||
| + | File:22.03.2014 RMSEw(Band) q =30.png|q =30 дБГц | ||
| + | File:22.03.2014 RMSEw(Band) q =35.png|q =35 дБГц | ||
| + | File:22.03.2014 RMSEw(Band) q =40.png|q =40 дБГц | ||
| + | File:22.03.2014 RMSEw(Band) q =45.png|q =45 дБГц | ||
| + | </gallery></center> | ||
| + | |||
| + | Они же сведены в таблицу: | ||
| + | |||
| + | {| class="wikitable" border="1" | ||
| + | |- | ||
| + | !q, дбГц | ||
| + | |30 | ||
| + | |35 | ||
| + | |40 | ||
| + | |45 | ||
| + | |- | ||
| + | !Полоса, Гц | ||
| + | |0.03 | ||
| + | |0.1 | ||
| + | |0.35 | ||
| + | |1 | ||
| + | |- | ||
| + | !СКОш, Гц | ||
| + | |1.14 | ||
| + | |0.68 | ||
| + | |0.38 | ||
| + | |0.22 | ||
| + | |} | ||
Версия 14:16, 22 марта 2014
Данная страница являет собой заметку "чтобы не забыть".
Необходимо выбрать полосы систем слежения, реализуемых в Импале. На данный момент полосы предполагается задавать таблично, в зависимости от текущего отношения сигнал/шум.
Система слежения за частотой
На момент написания этой заметки, в Импале реализована ССЧ второго порядка с дискриминатором типа
 .
.
При помощи модели системы в Matlab получены зависимости СКОш оценивания частоты от полосы системы для различных значений отношения сигнал/шум. В качестве входного воздействия подавался процесс ухода частоты опорного генератора, отвечающий модели вида:
 .
.
Результаты моделирования, полученные при параметрах  .
.
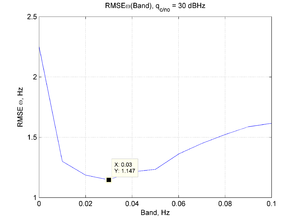
q =30 дБГц
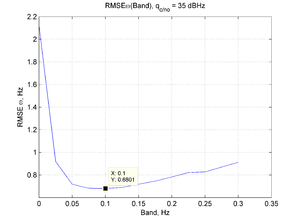
q =35 дБГц
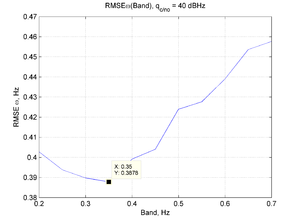
q =40 дБГц
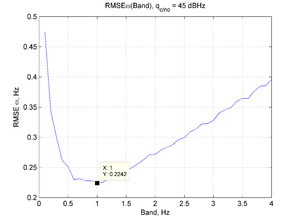
q =45 дБГц
_q_%3D30.png)
_q_%3D35.png)
_q_%3D40.png)
_q_%3D45.png)
Они же сведены в таблицу:
| q, дбГц | 30 | 35 | 40 | 45 |
|---|---|---|---|---|
| Полоса, Гц | 0.03 | 0.1 | 0.35 | 1 |
| СКОш, Гц | 1.14 | 0.68 | 0.38 | 0.22 |
[ Хронологический вид ]Комментарии
Войдите, чтобы комментировать.